目前,该链接适用于多种节点/接头。但请注意以下不支持的功能。
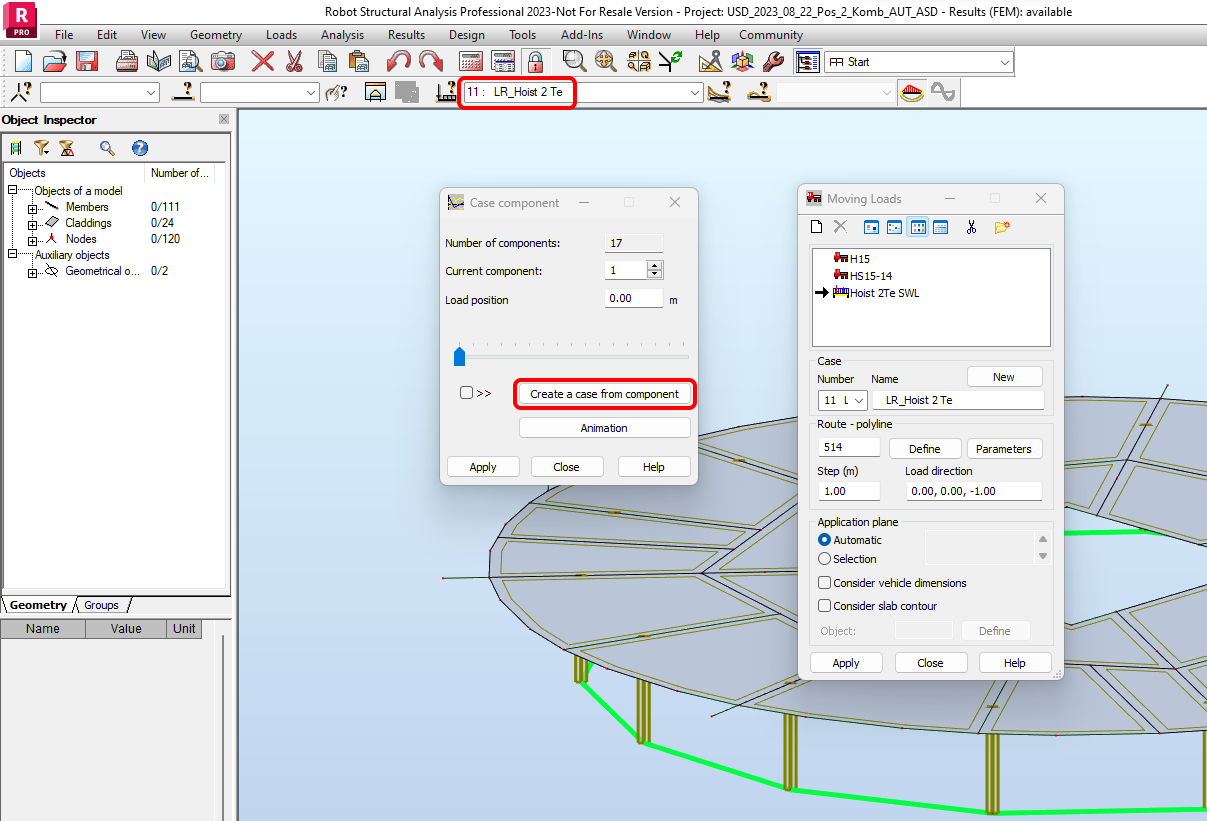
限制:移动(步进)荷载工况不会导入到 Checkbot。包含移动(步进)荷载工况的荷载组合会被导入,但移动(步进)荷载工况及其内力不包含在内。
解决方法:在 Robot Structural Analysis 中使用"从分量创建工况"命令,将移动(步进)荷载工况分解为单个荷载工况。然后导入节点或构件,这些荷载工况将单独导入,并包含在已定义的荷载组合中。
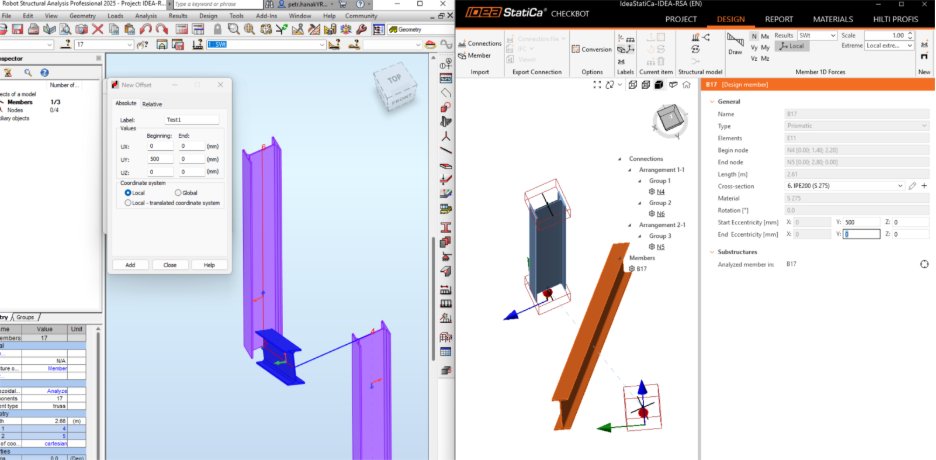
限制: 在 Robot 中起点和终点使用不同偏移量时,受这些偏移量影响的构件最终几何形状在 Robot 和 Checkbot 中会有所不同。原因在于两款软件应用这些偏心的方式不同。
解决方法: 在 Checkbot 中使用起点和终点偏心项调整几何形状,以达到所需的几何效果。
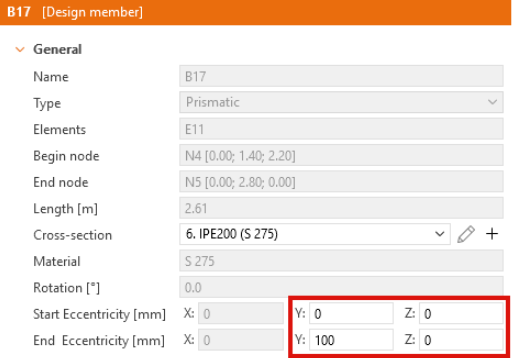
限制: 在 Robot 中仅在一端定义偏心——此类导入方式在 Checkbot 中不受支持,导入后的几何形状不正确。问题原因在于:在 Robot 中,构件的局部坐标系(LCS)已包含所定义的偏心。导入 Checkbot 时,构件根据 Robot 局部坐标系的起点和方向生成,导致构件从起点就已定位错误。此外,Robot 中定义的偏心在 Checkbot 中被再次施加,进一步加大了偏差,使预期几何形状与导入几何形状之间的差异更大。
解决方法: 不要在 Robot 中使用单侧偏心;改为在导入后在 Checkbot 中手动调整。但这意味着无法使用同步功能。