Hiện tại, liên kết hoạt động cho nhiều loại liên kết/nút liên kết. Tuy nhiên, vui lòng lưu ý các chức năng chưa được hỗ trợ.
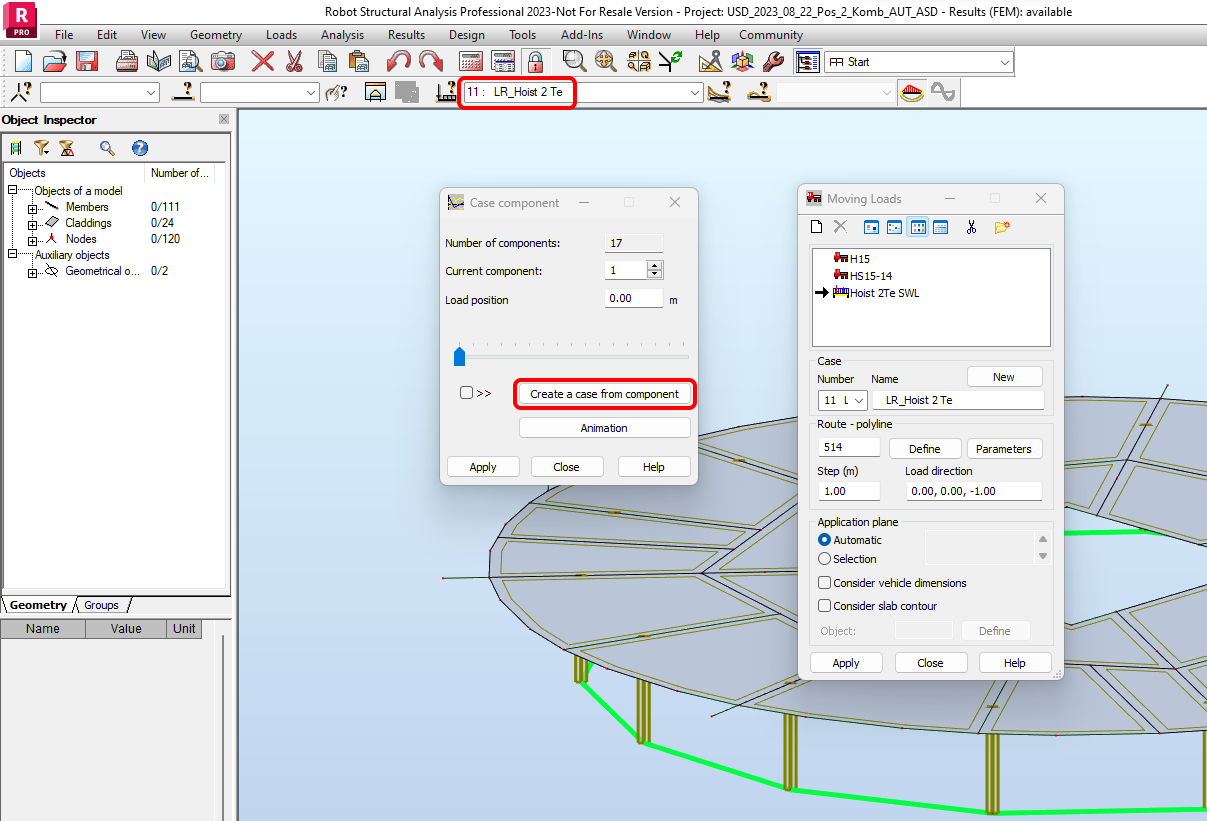
Hạn chế: Trường hợp tải trọng di động (theo bước) không được nhập vào Checkbot. Các tổ hợp tải trọng chứa Trường hợp tải trọng di động (theo bước) được nhập, nhưng bản thân các Trường hợp tải trọng di động (theo bước) và nội lực của chúng không được bao gồm.
Giải pháp thay thế: Phân tách Trường hợp tải trọng di động (theo bước) thành các trường hợp tải trọng đơn lẻ trong Robot Structural Analysis bằng lệnh "Create a case from component". Sau đó, nhập liên kết hoặc cấu kiện, và các trường hợp tải trọng này sẽ được nhập riêng lẻ cũng như được bao gồm trong các tổ hợp tải trọng đã định nghĩa.
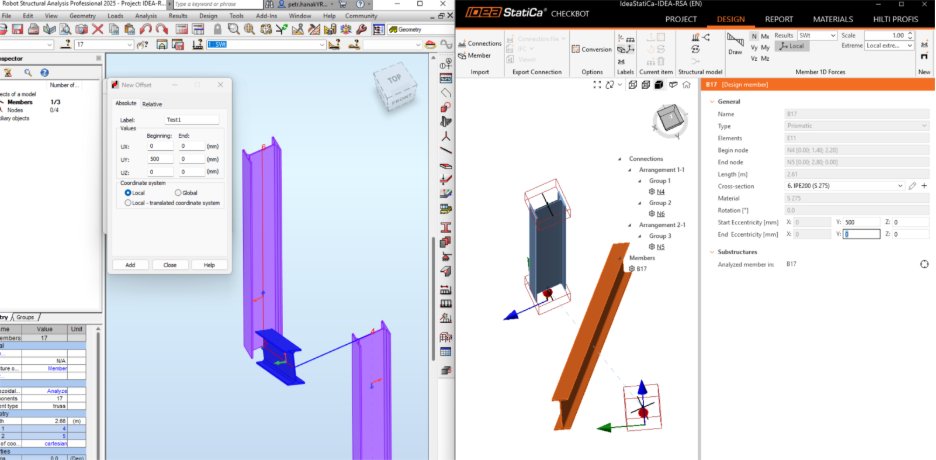
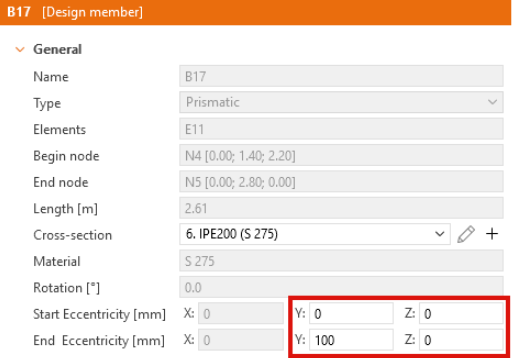
Hạn chế: Sử dụng các độ lệch tâm khác nhau ở đầu và cuối trong Robot sẽ khiến hình học cuối cùng của các đối tượng bị ảnh hưởng bởi các độ lệch tâm này khác nhau giữa Robot và Checkbot. Nguyên nhân là do cách áp dụng các độ lệch tâm này khác nhau trong mỗi phần mềm.
Giải pháp thay thế: Điều chỉnh hình học bằng cách sử dụng các mục Độ lệch tâm Đầu và Cuối trong Checkbot để đạt được hình học mong muốn.
Hạn chế: Độ lệch tâm chỉ được định nghĩa ở một đầu trong Robot – kiểu nhập này không được hỗ trợ trong Checkbot và hình học kết quả sẽ không chính xác. Vấn đề xảy ra vì trong Robot, hệ tọa độ cục bộ (LCS) của cấu kiện đã bao gồm độ lệch tâm được định nghĩa. Khi nhập vào Checkbot, cấu kiện được tạo ra dựa trên điểm bắt đầu và hướng lấy từ LCS của Robot. Điều này khiến phần tử bị định vị sai ngay từ đầu. Hơn nữa, độ lệch tâm được định nghĩa trong Robot lại được áp dụng thêm một lần nữa trong Checkbot, làm tăng thêm sự sai lệch và dẫn đến sự khác biệt lớn hơn giữa hình học dự kiến và hình học được nhập.
Giải pháp thay thế: Không sử dụng độ lệch tâm một phía trong Robot; thay vào đó, hãy điều chỉnh thủ công trong Checkbot sau khi nhập. Tuy nhiên, điều này có nghĩa là không thể sử dụng tùy chọn đồng bộ hóa.