
关于项目
该项目基于机械工程与结构工程的协同合作,顶部运动学机械臂由一组机械工程师负责设计、分析和校核。首席工程师 Jakub Čech 负责钢结构团队,另有五名结构工程师参与计算工作。
机械臂是一种通常可编程的机械手臂,其功能与人类手臂类似。该手臂可以是整个机构的全部,也可以是更复杂机器人的一部分。此类操作臂的各连杆通过关节相连,可实现旋转运动(如关节型机器人)或平移(线性)位移。
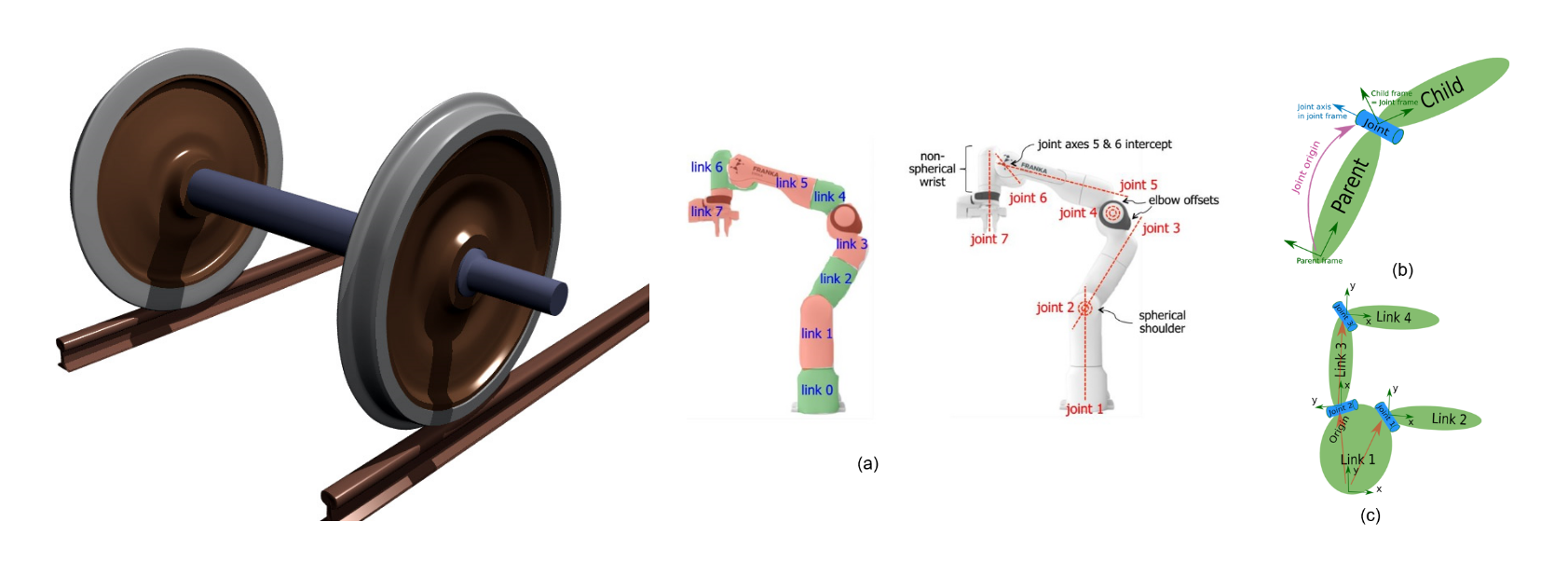
示意图:火车轮对及机械臂运动的运动学原理
钢结构底座与 IDEA StatiCa
模型的机械部分必须固定在刚性底座上,以最大限度地减少变形,确保装配过程中的正确操控。这要求进行精确的设计、分析和规范校核。共同构成机械部件支撑体系的所有组件,包括板件、螺栓和焊缝,均需确保子结构的空间刚度,并须进行精确分析。

机械臂底座施工图
由于机械臂需要对货物、工件、包裹等进行拾取和放置操作,力随时间不断变化。除静态力外,还考虑了离心力和惯性力。这些力与运动的角速度密切相关。底座的设计和规范校核考虑了力的最不利组合。各力由刚体动力学仿真推导得出。
模型由锚固于混凝土块上的底板组装而成。带开孔的底座箱体采用焊接加劲板进行加强。模型确保了空间稳定性和刚度。锚固模型的复杂性可在实体视图和透明视图中清晰呈现。
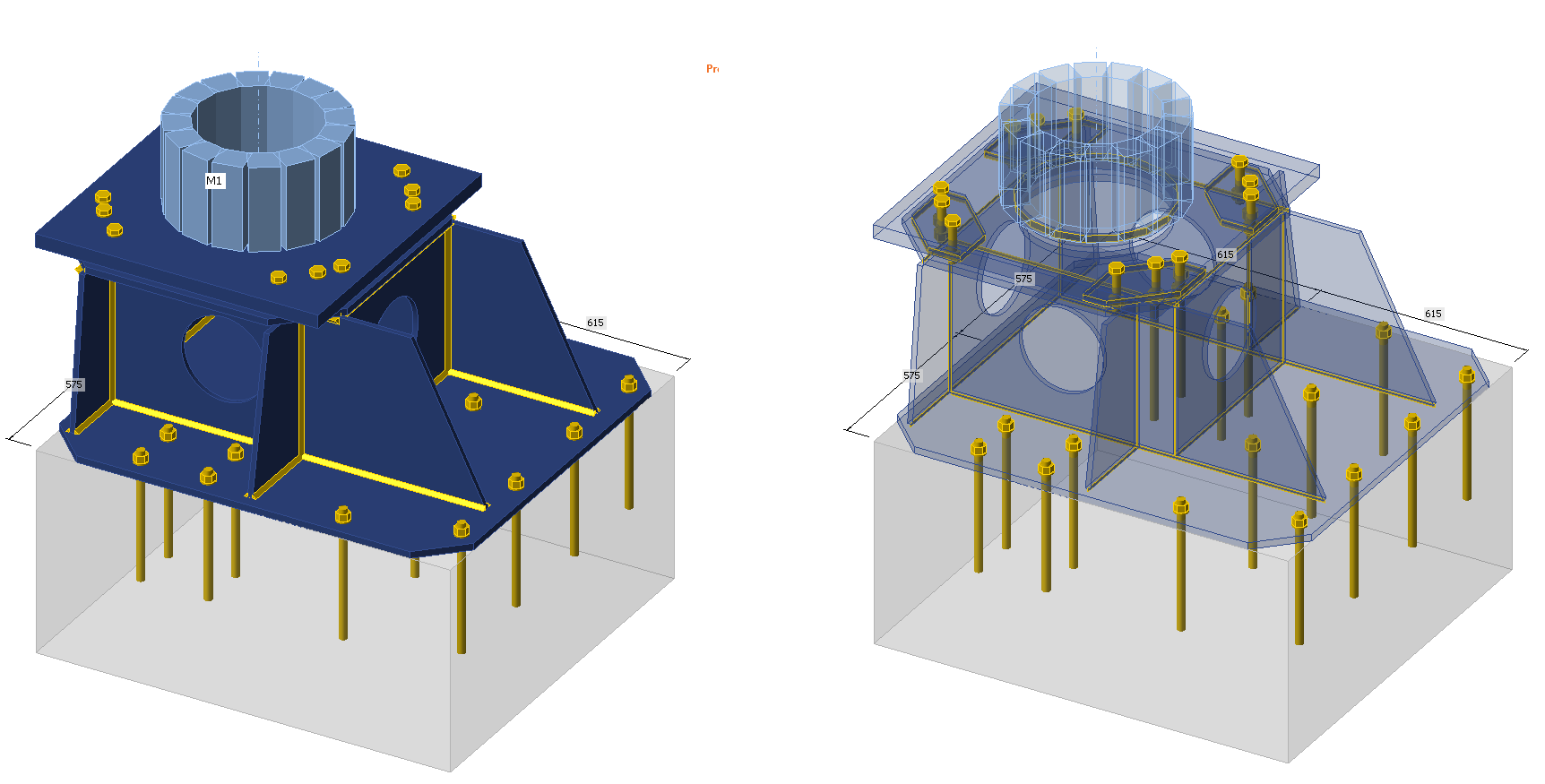
模型及各组件的实体视图与透明视图
借助先进的建模技术以及 IDEA StatiCa Connection 强大的求解引擎,我们采用材料非线性分析对模型进行了应力-应变分析。
结果与规范校核
设计和规范校核满足欧洲规范的全部要求。
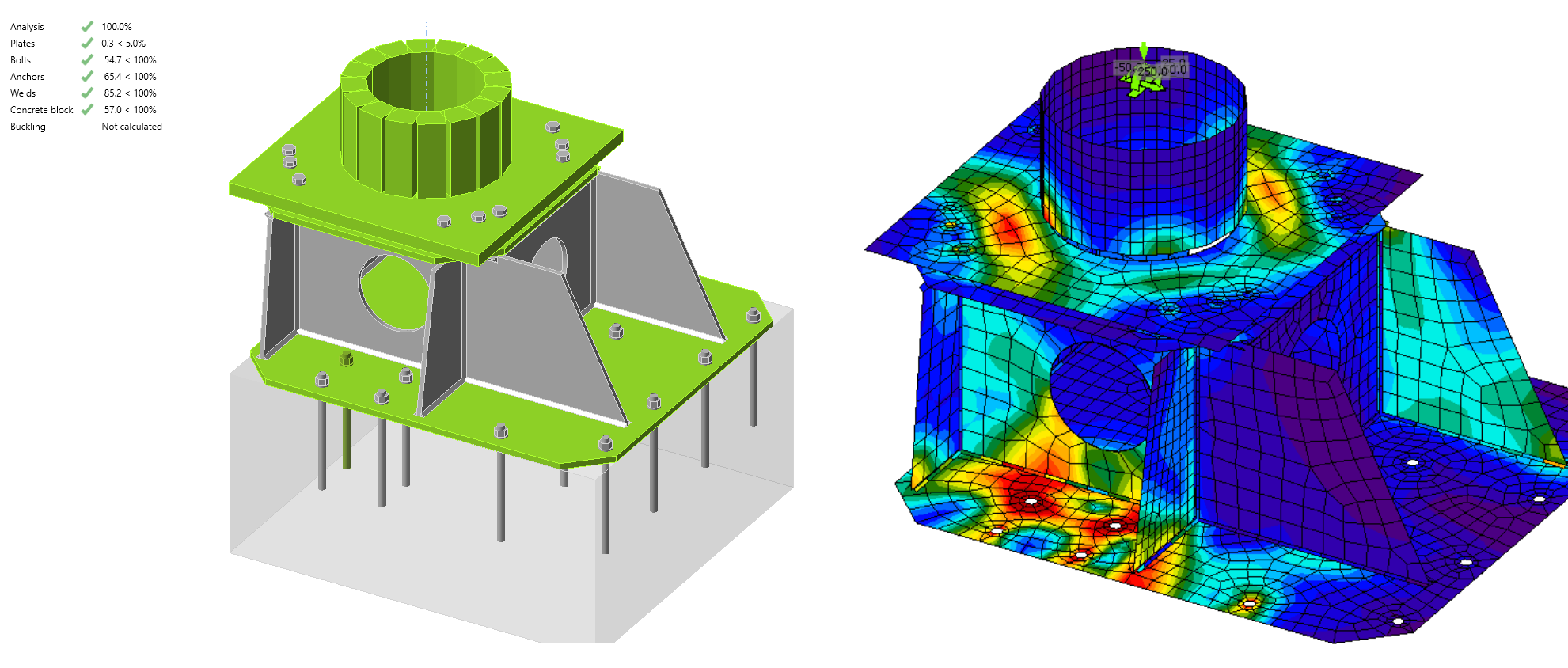
各组件承载比及 Von Mises 应力
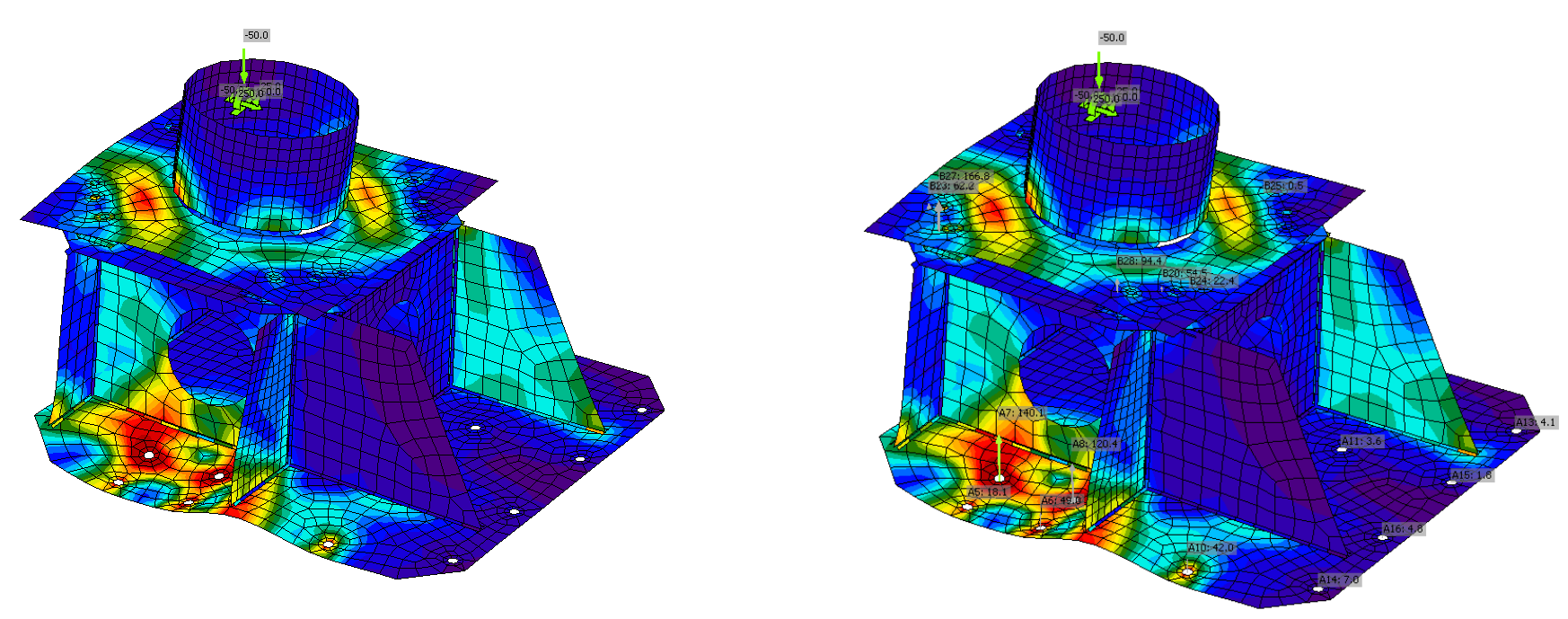
放大后的变形及锚栓内力
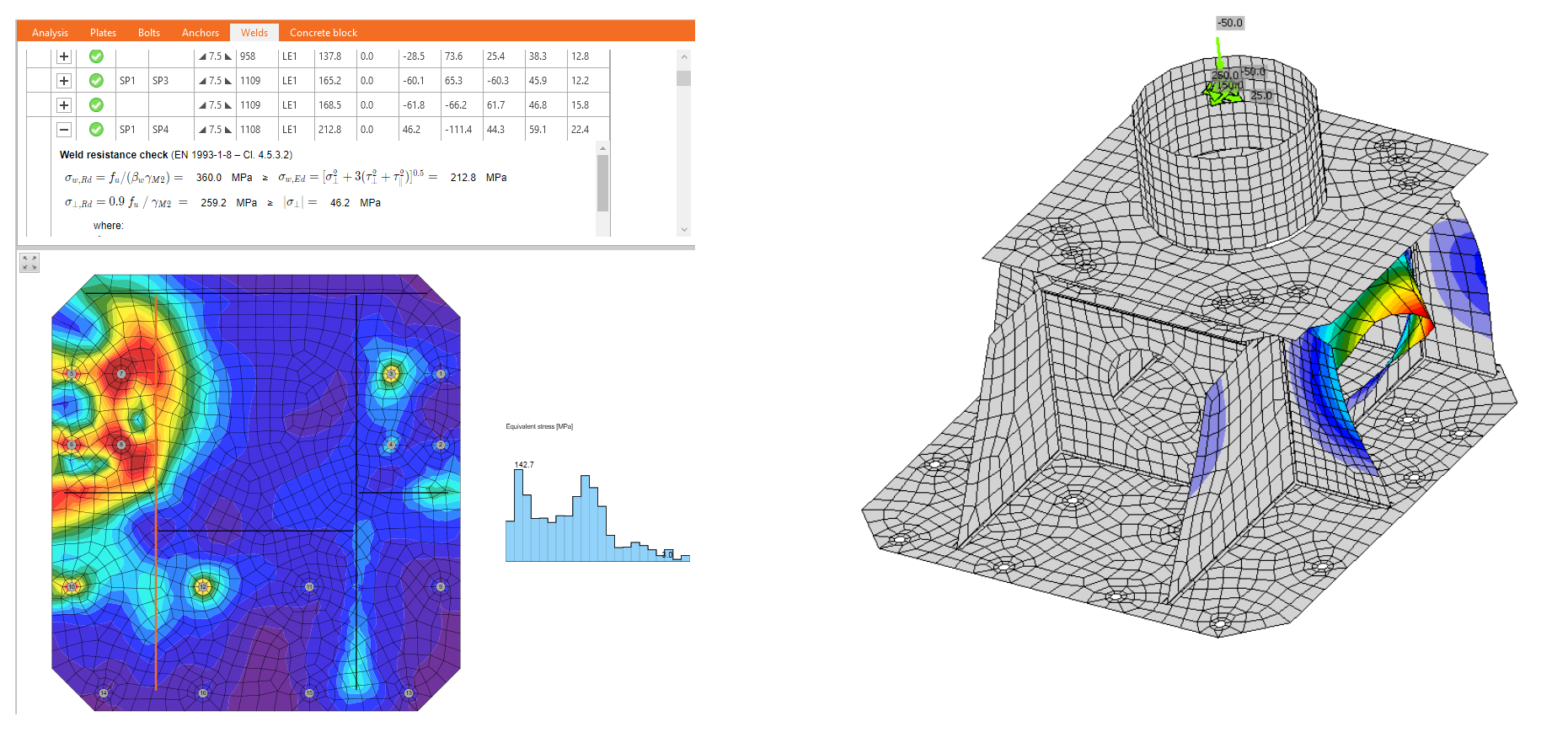
焊缝应力及第一阶屈曲模态
结论
IDEA StatiCa 与 BKB Metal 密切合作,提交了包含详细建模方法说明及注释结果的模型报告。IDEA StatiCa 工程咨询服务为企业工程项目提供必要的专业知识和指导,并就如何最有效地满足设计与施工需求向客户提供建议。
该复杂底座承受了所有最不利荷载组合,并满足欧洲规范的相关要求。模型已完成应力-应变分析和屈曲分析,以验证设计的各个方面。IDEA StatiCa Connection 软件在机械工程领域同样具有巨大潜力,可作为机械臂底座设计与规范校核的专业工具。
Jakub Čech 及其团队对此给予了极为积极的反馈,BKB Metal 与 IDEA StatiCa 双方均对合作成果感到满意。
如需进一步了解 IDEA StatiCa 工程咨询服务,请联系您当地的经销商或 IDEA StatiCa 区域办事处。
立即开始试用,享受 14 天完整功能与服务,完全免费。
开始免费试用